1st Manned Lunar Landing and 1st Robotic Mars Landing Commemorative Release: Viking 1 Landing Site in Chryse Planitia - Infrared Image
Caption:
(Released 20 July 2002)
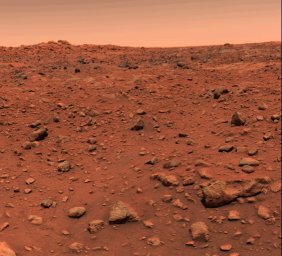
The date July 20 marks two major milestones in humanity's grand push to explore the frontier of space. On this date, in 1969, the Apollo 11 lunar module Eagle landed the first men (Neil Armstrong and Edwin "Buzz" Aldrin) on another celestial body, the Moon . In 1976, seven years to the day, the robotic Viking 1 Lander made the first successful landing on the ruddy rock strewn surface of Mars . To commemorate these milestones the THEMIS Team is releasing both an IR (Infra-Red) and
Visible image
of the Viking 1 landing site. THEMIS is currently imaging landing sites for future robotic missions including the twin Mars Exploration Rovers set to touchdown in January 2004. All of these missions anticipate the day when, hopefully in the not too distant future, astronauts will land on the red planet. So as we reflect on our rich tradition of space exploration let us also dream and plan on a wondrous future exploring the mysterious red planet.
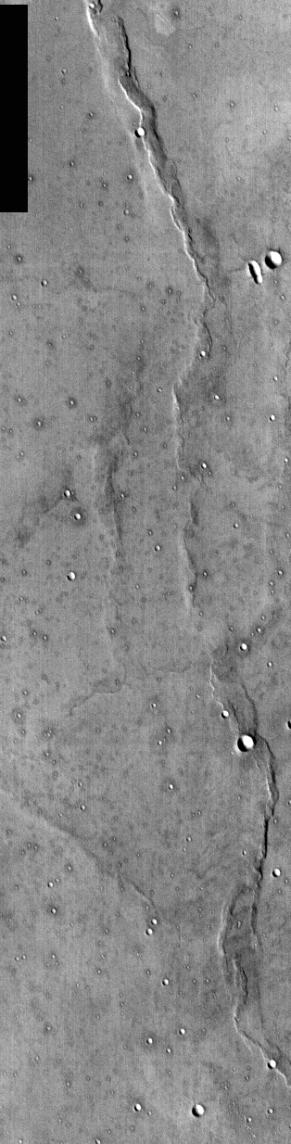
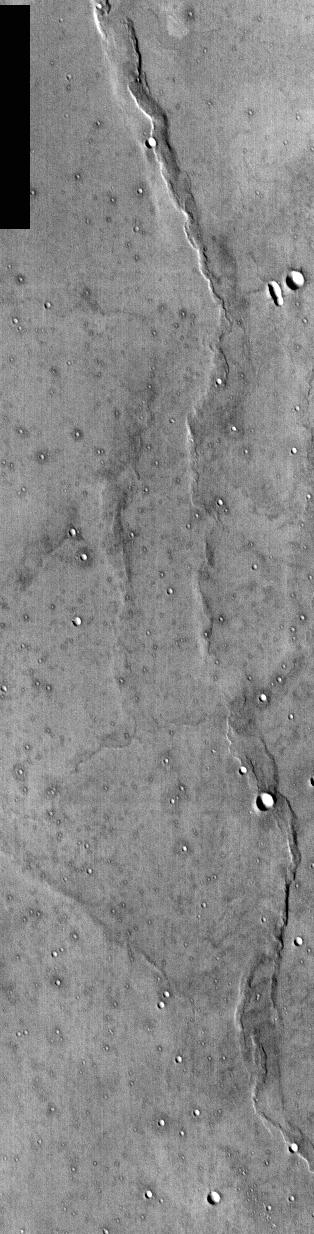
Viking 1 landed on a relatively smooth plain in Chryse Planitia (Plains of Gold), which is a low region of the northern hemisphere of Mars. The reported landing site is 22.48° N, 49.97° W. The landing site is marked with an X in the images. This region of Mars is dominated by plains, wrinkle ridges, and impact craters.
This one band IR (band 9 at 12.6 microns) image shows bright and dark textures, which are primarily due to differences in the abundance of rocks on the surface. The relatively cool (dark) regions during the day are rocky or indurated materials whereas fine sand and dust are warmer (bright). The brightness levels show daytime surface temperatures, which range from about minus 34 degrees to minus 22 degrees Celsius (minus 29 degrees to minus 8 degrees Fahrenheit). Many of the temperature variations are due to slope effects, with sun-facing slopes warmer than shaded slopes. The dark rings around several of the craters are due to the presence of rocky (cool) material ejected from the crater. These rocks are well below the resolution of any existing Mars camera, but THEMIS can detect the temperature variations they produce.
Daytime temperature variations are produced by a combination of topographic (solar heating) and thermophysical (thermal inertia and albedo) effects. Due to topographic heating the surface morphologies seen in THEMIS daytime IR images are similar to those seen in previous imagery and MOLA topography. Smooth, undulating, and ridged plains dominate this scene. The major thermophysical variations seen in daytime images are associated with impact craters and the wrinkle ridges. Other than these ejecta deposits and the wrinkle ridges, there is little variation in the thermophysical properties of the surface materials.
Cataloging Keywords:
| Name |
Value |
Additional Values |
| Target |
Mars |
|
| System |
|
|
| Target Type |
Planet |
|
| Mission |
2001 Mars Odyssey |
Mars Exploration Rover (MER), Viking |
| Instrument Host |
Mars Odyssey |
Viking 1 Lander |
| Host Type |
Orbiter |
Lander, Rover |
| Instrument |
Thermal Emission Imaging System (THEMIS) |
|
| Detector |
|
|
| Extra Keywords |
Color, Crater, Dust, Impact, Infrared, Moon, Thermal |
| Acquisition Date |
|
| Release Date |
2002-07-22 |
| Date in Caption |
2002-07-20 |
|
| Image Credit |
NASA/JPL/Arizona State University |
| Source |
photojournal.jpl.nasa.gov/catalog/PIA03901 |
| Identifier |
PIA03901 |
{kind=link}
{kind=link}