skip to navigation
|
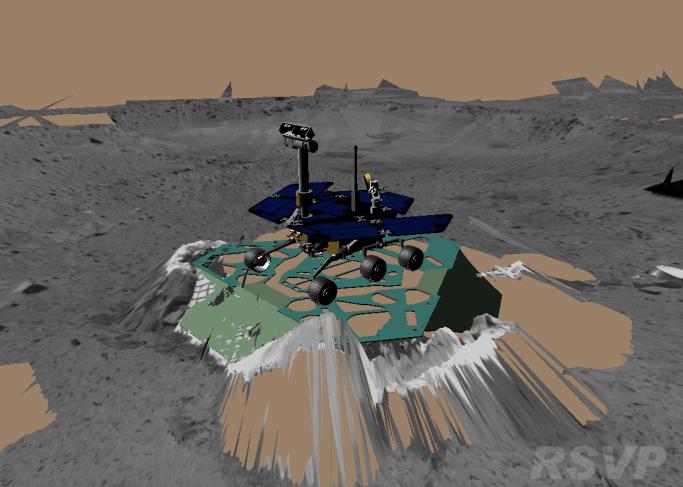
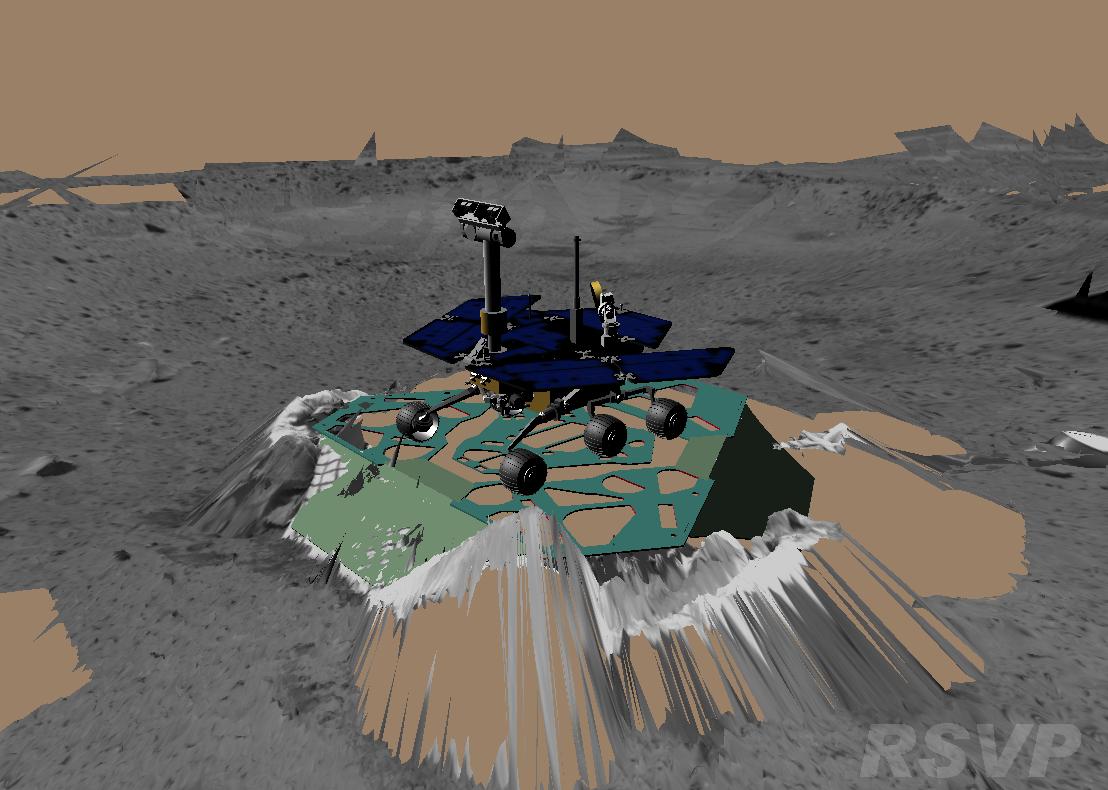
Virtual Rover Takes its First Turn
- Click the image above for a larger view
- Full-Res JPEG (1108 x 790) (107.0 kB)
- Full-Res TIFF (1108 x 790) (869.7 kB)
{kind=link}
Caption:
This image shows a screenshot from the software used by engineers to drive the Mars Exploration Rover Spirit. The software simulates the rover's movements across the martian terrain, helping to plot a safe course for the rover. The virtual 3-D world around the rover is built from images taken by Spirit's stereo navigation cameras. Regions for which the rover has not yet acquired 3-D data are represented in beige. This image depicts the state of the rover before it backed up and turned 45 degrees on Sol 11 (01-13-04).
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Spirit (MER-A) | |
| Host Type | Rover | |
| Instrument | Navigation Camera (Navcam) | |
| Detector | ||
| Extra Keywords | Color | |
| Acquisition Date | ||
| Release Date | 2004-01-13 | |
| Date in Caption | ||
| Image Credit | NASA/JPL | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05063 | |
| Identifier | PIA05063 | |