skip to navigation
|
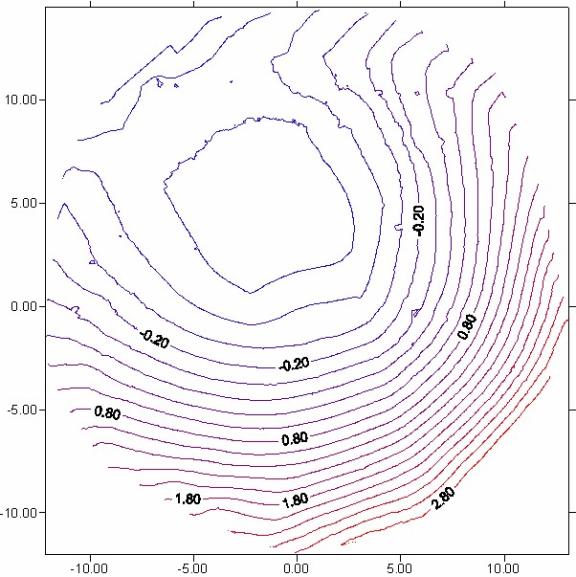
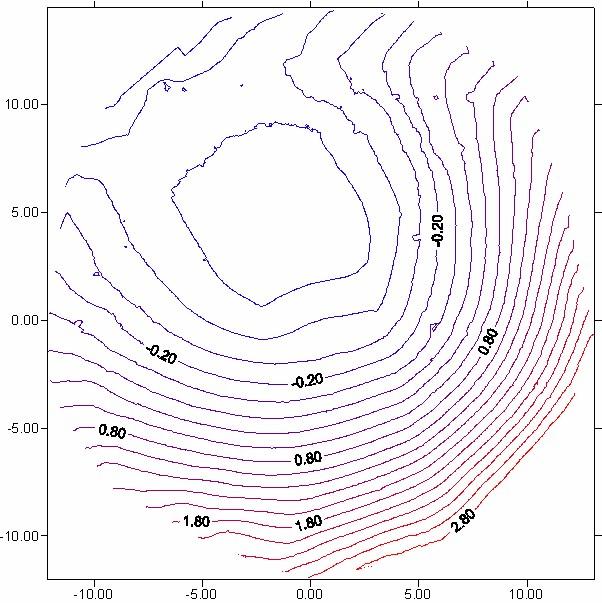
An Intimate Look at a Martian Crater
- Click the image above for a larger view
- Full-Res JPEG (602 x 603) (73.5 kB)
- Full-Res TIFF (602 x 603) (386.2 kB)
{kind=link}
Caption:
This 3-D contour map shows the martian crater currently cradling the Mars Exploration Rover Opportunity. It is the first look at the shape of a crater on another planet from the unique vantage point of inside the crater itself. Engineers and scientists will use this data to plot an exit route for Opportunity once it is ready to roll out of the crater; to characterize geological features of the crater; and to help pinpoint the rover's location on the surface of Mars. The crater is estimated to be 3 meters (9.8 feet) deep and 22 (72.2) meters across. The map consists of data from the rover's panoramic camera.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Opportunity (MER-B) | |
| Host Type | Rover | |
| Instrument | Panoramic Camera (Pancam) | |
| Detector | ||
| Extra Keywords | Color, Crater, Map | |
| Acquisition Date | ||
| Release Date | 2004-01-30 | |
| Date in Caption | ||
| Image Credit | NASA/JPL/Ohio State University | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05173 | |
| Identifier | PIA05173 | |