skip to navigation
|
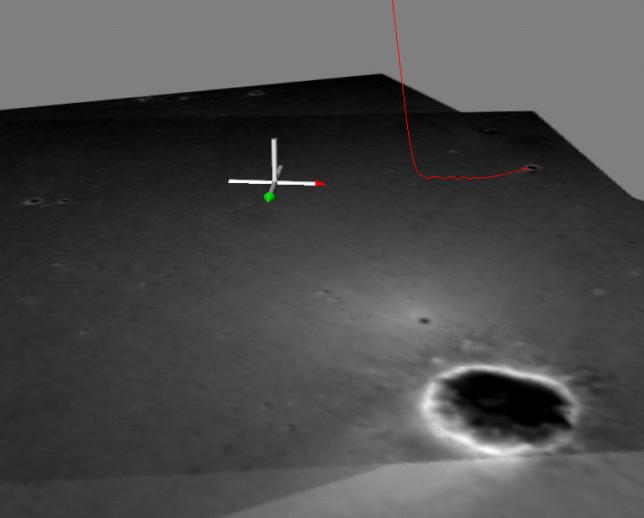
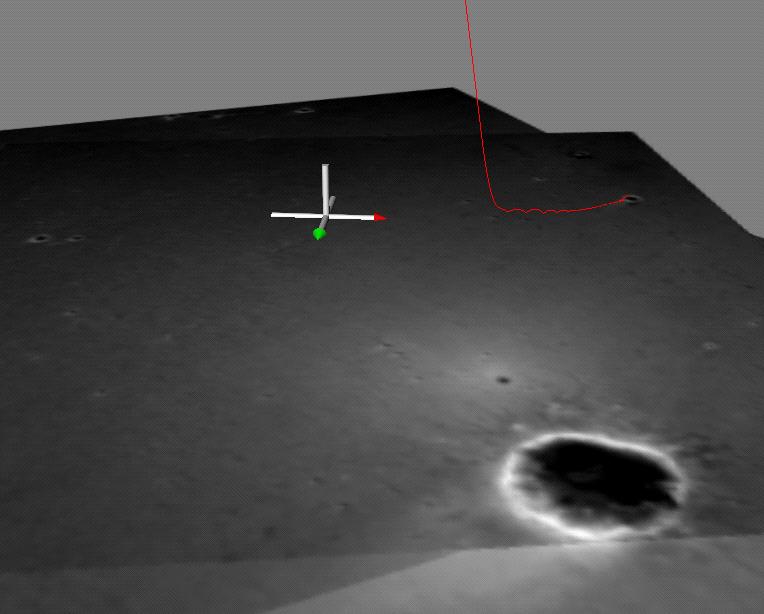
Opportunity’s Hole in One (Side View)
- Click the image above for a larger view
- Full-Res JPEG (764 x 614) (40.3 kB)
- Full-Res TIFF (764 x 614) (1.4 MB)
{kind=link}
Caption:
In this side view of the path the Mars Exploration Rover Opportunity took when it landed at Meridiani Planum, Mars, a computer-generated red line shows the path of the spacecraft's descent and bouncing along the surface. The line is superimposed on a mosaic of the three images taken during descent by the descent image motion estimation system camera, located on the bottom of the lander. Initially, the Opportunity lander was traveling east, but near the end of its descent, it began moving north. When the lander was released from the parachute, the spacecraft bounced to the north into the crater shown at the top of the image. North is indicated by the red-tipped white arrow in the coordinate axes and east, by the green-tipped white arrow.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Opportunity (MER-B) | |
| Host Type | Rover | |
| Instrument | Descent Image Motion Estimation System (DIMES) | |
| Detector | ||
| Extra Keywords | Color, Crater | |
| Acquisition Date | ||
| Release Date | 2004-02-09 | |
| Date in Caption | ||
| Image Credit | NASA/JPL | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05226 | |
| Identifier | PIA05226 | |