|
Pre-Planning the “Last Chance”
- Click the image above for a larger view
- Full-Res JPEG (1113 x 731) (152.5 kB)
- Full-Res TIFF (1113 x 731) (852.1 kB)
{kind=link}
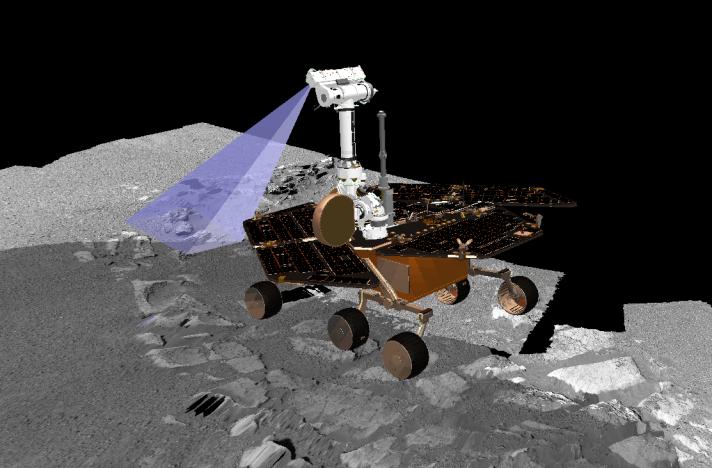
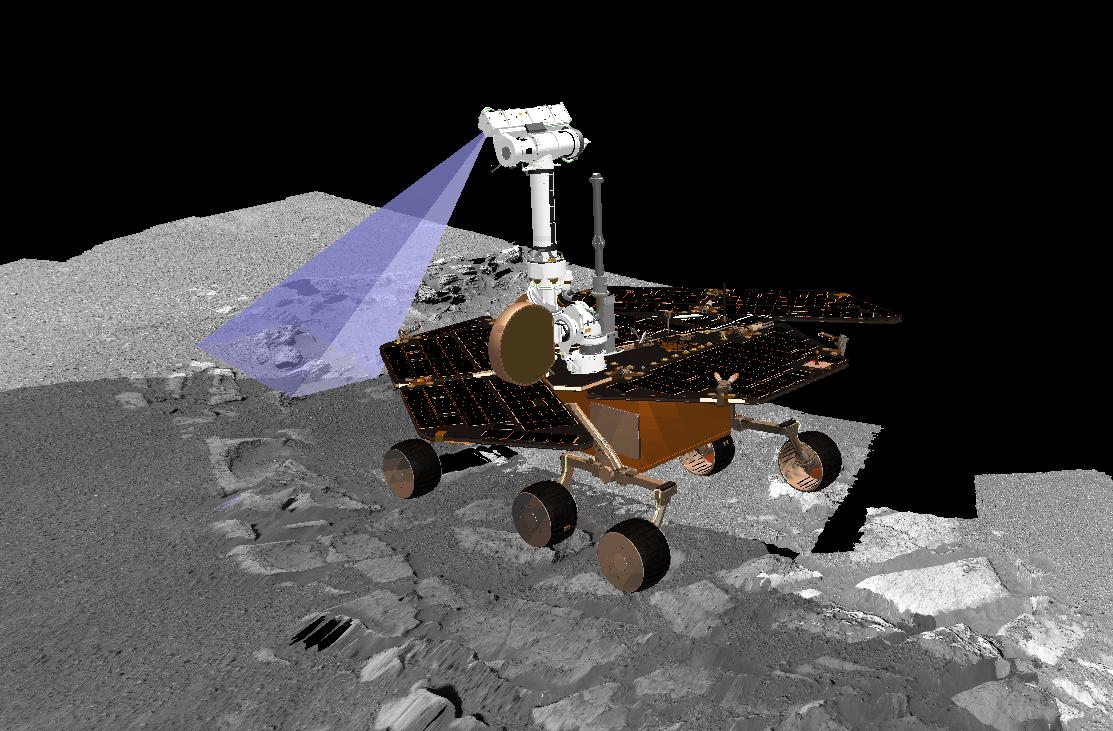
Caption:
This graphic is a screenshot from a computer-generated visualization tool used by Mars Exploration Rover Opportunity scientists to find the rover's best position for observing a future target dubbed "Last Chance." Team members are determining how to obtain the optimal angle for photographing this layered rock, located on the far east end of the outcrop. The rover drivers must solve very complex geometry calculations to position the cameras at just the right distance from the rock with exactly the right illumination by the Sun. If the rover is parked to the west of the target, and the Sun is setting in the west when the rover is commanded to take the picture, the rover will cast a shadow on the prime location and important features in the image will be lost in the dark.
The planning of this particular photo of "Last Chance" is particularly complex because the uneven terrain underneath the rover will cause the camera angle to tilt. All six rover wheels will be sitting on varied levels of rock and soil, creating a more difficult camera-aiming challenge. The rock area itself is at a right angle, which further complicates matters because the science team plans to take pictures from two sides of the rock to better understand how this rock formed.
The number of pictures the science team plans to take of this site adds yet another layer of necessary forethought: the flash memory must be empty enough to record and store the large images before transmitting the data back to Earth. Three sols in advance of taking the pictures, the longterm planning team is asking the science team to conserve data volume to allow for an onslaught of new panoramic camera images scheduled for sol 36.
This visualization software was created by the rover visualization team from NASA Ames Research Center, Moffett Field, Calif. Its terrain models are built from images taken by the rover's panoramic camera on the surface of Mars. The rover model, based on animations and drawings designed by Dan Maas at Maas Digital LLC, contains precise dimensions of the rover's mast and camera locations in relation to its entire body and wheels to an accuracy of centimeters.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Opportunity (MER-B) | |
| Host Type | Rover | |
| Instrument | Panoramic Camera (Pancam) | |
| Detector | ||
| Extra Keywords | Color, Shadow | |
| Acquisition Date | ||
| Release Date | 2004-02-27 | |
| Date in Caption | ||
| Image Credit | NASA/JPL/Ames | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05461 | |
| Identifier | PIA05461 | |