skip to navigation
|
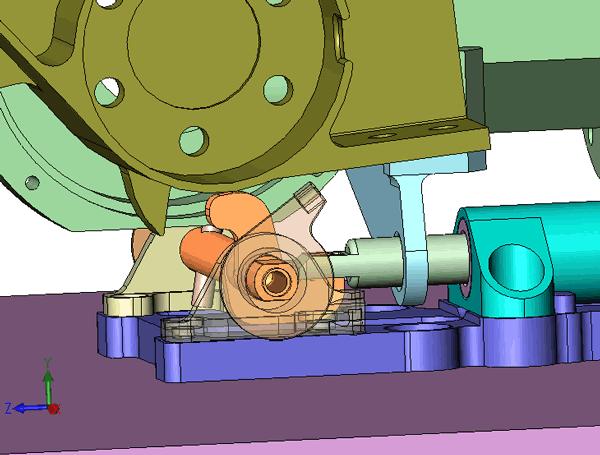
Animation of Phoenix’s Wrist Unlatching
- Click the image above for a larger view
 Movie Download Options
Movie Download Options- Full-Res JPEG (600 x 455) (42.8 kB)
- Full-Res TIFF (600 x 455) (275.1 kB)
{kind=link}
Caption:
This animation shows what happened underneath Phoenix's Robotic Arm wrist on Sol 3. The pin that goes through the loop is what holds the wrist in place. The rotation of the wrist pops the pin free.
Background Info:
The Phoenix Mission is led by the University of Arizona, Tucson, on behalf of NASA. Project management of the mission is by NASA's Jet Propulsion Laboratory, Pasadena, Calif. Spacecraft development is by Lockheed Martin Space Systems, Denver.
Photojournal Note: As planned, the Phoenix lander, which landed May 25, 2008 23:53 UTC, ended communications in November 2008, about six months after landing, when its solar panels ceased operating in the dark Martian winter.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Phoenix | |
| Instrument Host | Phoenix Lander | |
| Host Type | Lander | |
| Instrument | Robotic Arm Camera (RAC) | |
| Detector | ||
| Extra Keywords | Color, Movie, Rotation | |
| Acquisition Date | ||
| Release Date | 2008-05-29 | |
| Date in Caption | ||
| Image Credit | NASA/JPL-Caltech/University of Arizona | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA10729 | |
| Identifier | PIA10729 | |