skip to navigation
|
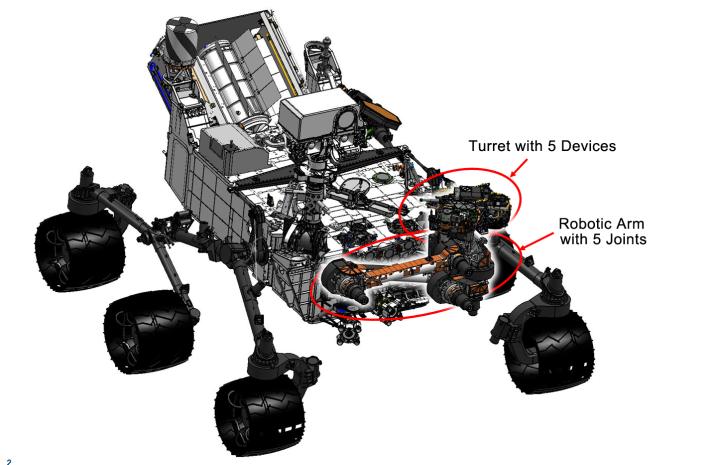
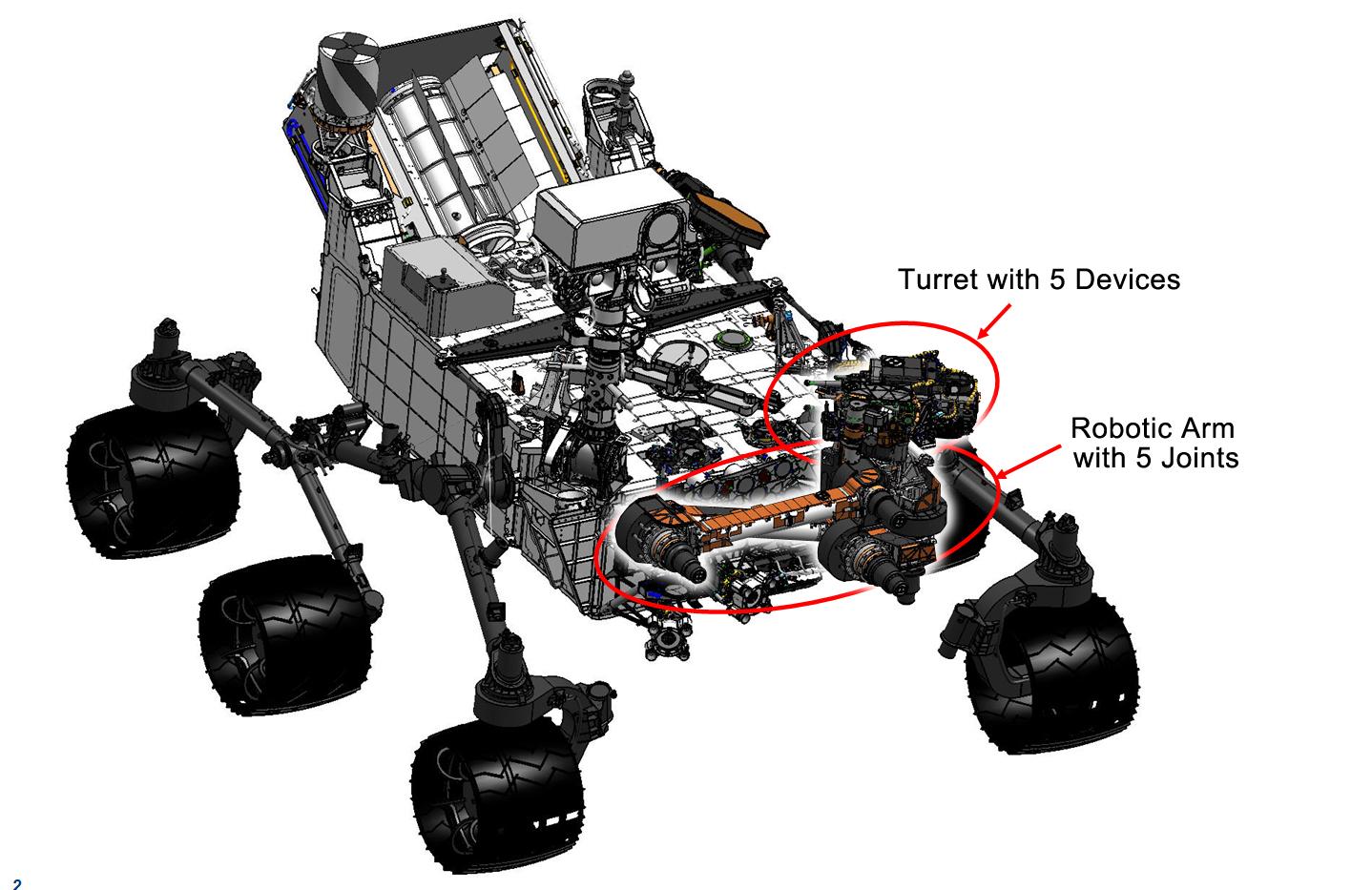
Curiosity’s Robotic Arm
- Click the image above for a larger view
- Full-Res JPEG (1438 x 933) (169.0 kB)
- Full-Res TIFF (1438 x 933) (4.0 MB)
{kind=link}
Caption:
This engineering drawing shows the location of the arm on NASA's Curiosity rover, in addition to the arm's turret, which holds two instruments and three tools. The arm places and holds turret-mounted tools on rock and soil targets. It also manipulates the sample-processing mechanisms on the 66-pound (30-kilogram) turret.
The arm has five degrees of freedom of movement provided by rotary actuators known as the shoulder azimuth joint, shoulder elevation joint, elbow joint, wrist joint and turret joint.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Science Laboratory (MSL) | |
| Instrument Host | Curiosity Rover | |
| Host Type | Rover | |
| Instrument | ||
| Detector | ||
| Extra Keywords | Color | |
| Acquisition Date | ||
| Release Date | 2012-09-06 | |
| Date in Caption | ||
| Image Credit | NASA/JPL-Caltech | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA16144 | |
| Identifier | PIA16144 | |