|
CHIMRA: Scoops, Sieves and Delivers Samples
- Click the image above for a larger view
- Full-Res JPEG (1438 x 933) (87.4 kB)
- Full-Res TIFF (1438 x 933) (4.0 MB)
{kind=link}
Caption:
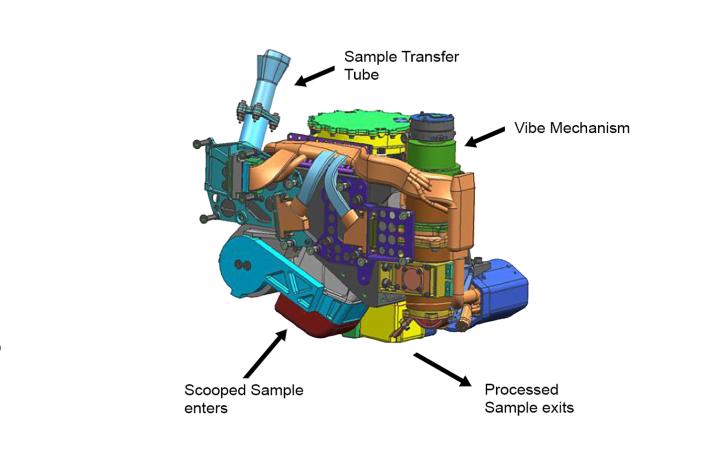
This false-color engineering drawing shows the Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) device, attached to the turret at the end of the robotic arm on NASA's Curiosity Mars rover. This device processes samples acquired from the built-in scoop (red) and the drill, which is not shown but is also part of the turret. CHIMRA also delivers samples to the analytical lab instruments inside the rover.
Two paths to get material into CHIMRA are shown (the scoop delivers material to the location marked at the bottom, and the drill deposits material to the sample transfer tube shown at top). Also marked are the location of the vibration mechanism used to shake the turret and cause the sample to move inside CHIMRA, and the portion box (yellow) from which the material processed through a sieve is delivered to the analytical lab instruments.
Background Info:
JPL manages the Mars Science Laboratory/Curiosity for NASA's Science Mission Directorate in Washington. The rover was designed, developed and assembled at JPL, a division of the California Institute of Technology in Pasadena.
For more about NASA's Curiosity mission, visit: http://www.jpl.nasa.gov/msl , http://www.nasa.gov/mars , and http://marsprogram.jpl.nasa.gov/msl .
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Science Laboratory (MSL) | |
| Instrument Host | Curiosity Rover | |
| Host Type | Rover | |
| Instrument | Collection and Handling for Interior Martian Rock Analysis (CHIMRA) | |
| Detector | ||
| Extra Keywords | Color | |
| Acquisition Date | ||
| Release Date | 2012-10-04 | |
| Date in Caption | ||
| Image Credit | NASA/JPL-Caltech | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA16206 | |
| Identifier | PIA16206 | |