
|
Opportunity’s First Decade of Driving on Mars
- Click the image above for a larger view
- Full-Res JPEG (4853 x 3687) (3.2 MB)
- Full-Res TIFF (4853 x 3687) (53.7 MB)
{kind=link}
Caption:
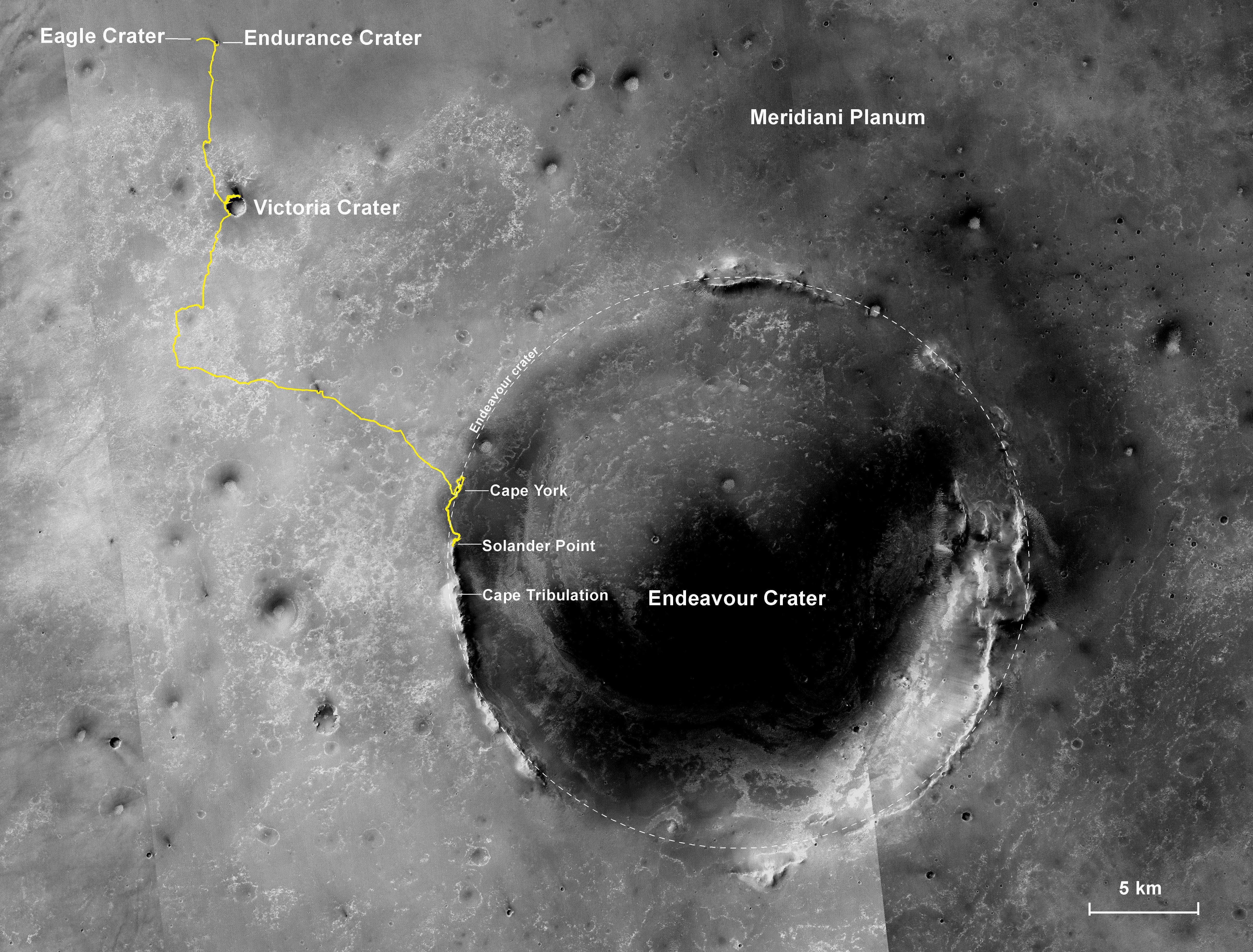
NASA's Mars Exploration Rover Opportunity has been working on Mars since landing inside Eagle Crater on Jan. 25, 2004 (Universal Time; evening of Jan. 24, Pacific Standard Time). The gold line on this image shows Opportunity's route from the landing site, in upper left, to the area it is investigating on the western rim of Endeavour Crater as of the rover's 10th anniversary on Mars, in Earth years.
In its first decade of driving on Mars, Opportunity covered a total of 24.07 miles (38.73 kilometers). In early 2014, Opportunity is ascending "Murray Ridge" above "Solander Point" on the rim of Endeavour Crater. A destination ahead, if the rover keeps working, is the "Cape Tribulation" section farther south on Endeavour's rim.
The features are all within the Meridiani Planum region of equatorial Mars, which was chosen as Opportunity's landing area because of earlier detection of the mineral hematite from orbit.
The base image for the map is a mosaic of images taken by the Context Camera on NASA's Mars Reconnaissance Orbiter. The 5-kilometer scale bar is 3.1 miles long, and the diameter of Endeavour Crater is about 14 miles (22 kilometers). North is up.
Background Info:
Opportunity completed its three-month prime mission in April 2004 and has continued operations in bonus extended missions. It has found several types of evidence of ancient environments with abundant liquid water. The Mars Reconnaissance Orbiter reached Mars in 2006, completed its prime mission in 2010, and is also working in an extended mission.
This traverse map was made at the New Mexico Museum of Natural History & Science, Albuquerque. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Exploration Rover Project and the Mars Reconnaissance Orbiter for the NASA Science Mission Directorate, Washington. Malin Space Science Systems, San Diego, built and operates the orbiter's Context Camera.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | Mars Reconnaissance Orbiter (MRO) |
| Instrument Host | Mars Reconnaissance Orbiter | Opportunity (MER-B) |
| Host Type | Orbiter | Rover |
| Instrument | Context Camera (CTX) | |
| Detector | ||
| Extra Keywords | Color, Crater, Map, Water | |
| Acquisition Date | ||
| Release Date | 2014-01-23 | |
| Date in Caption | 2004-01-25 | |
| Image Credit | NASA/JPL-Caltech/MSSS/NMMNHS | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA17758 | |
| Identifier | PIA17758 | |