|
Mapping Perseverance’s First Six Samples
- Click the image above for a larger view
- Full-Res JPEG (3300 x 2550) (1.8 MB)
- Full-Res TIFF (3300 x 2550) (25.3 MB)
{kind=link}
Caption:
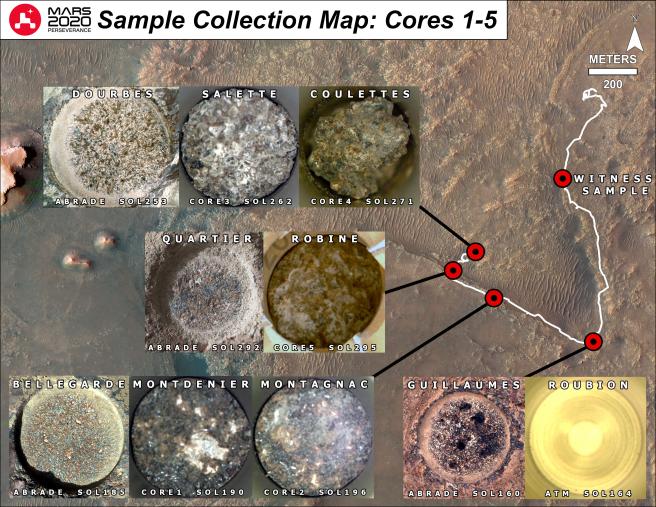
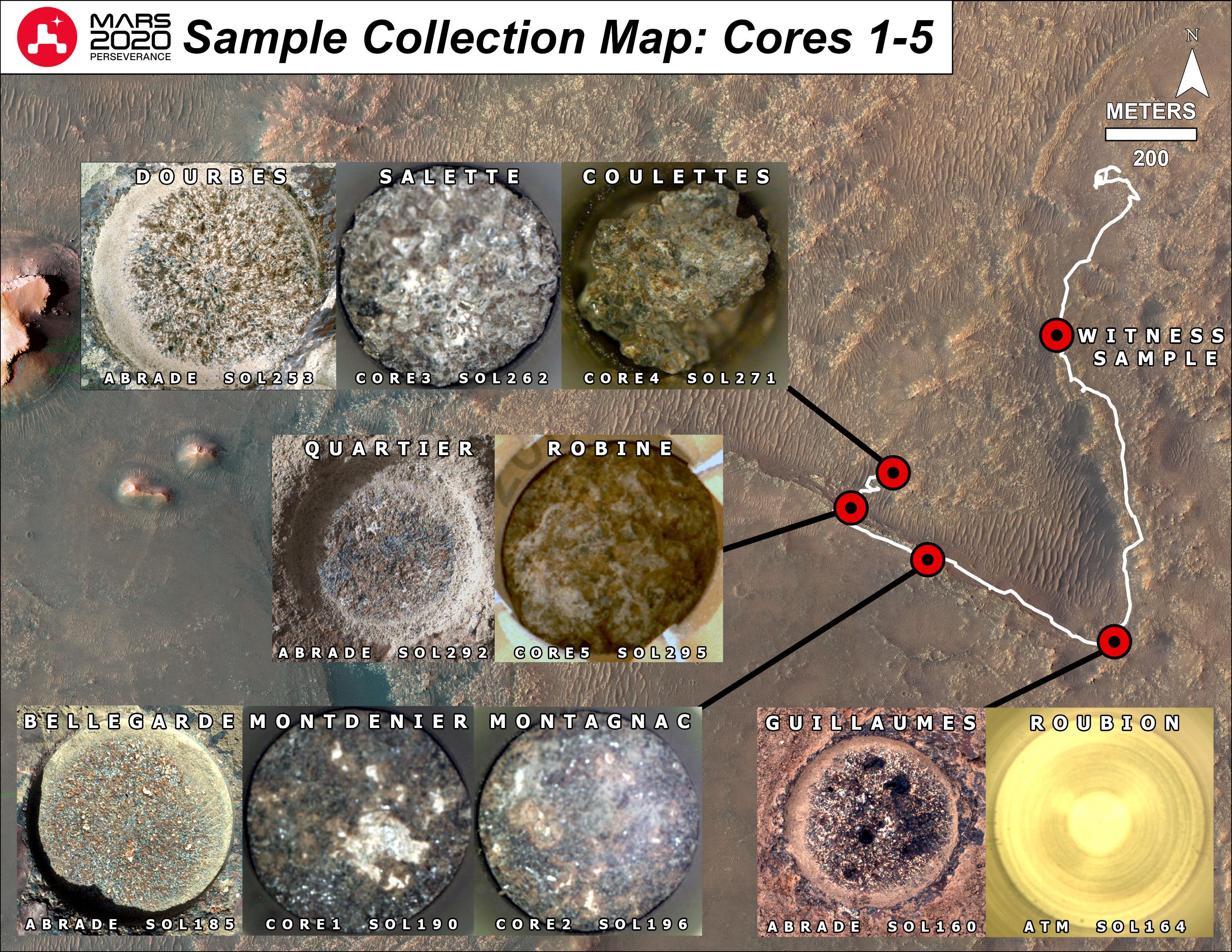
This annotated map shows the locations where NASA's Perseverance Mars rover collected its first witness tube and filled its first six samples.
The name that the Perseverance science and operations teams used to define a rock target on the Martian surface appears at the top of each inset image. Also indicated is the Martian day, or sol, of the rover's mission and whether the image shows a target that has been abraded for proximity science or from which a core sample was taken.
Before collecting a sample, Perseverance uses its drill to abrade the upper few millimeters of the rock surface close to the intended coring target. Those inset images annotated with the word "abrade" were captured by the rover's WATSON imager. Those with "core" were taken by the rover's CacheCam , which visually inspects a sample tube after a coring event takes place.
Background Info:
A key objective for Perseverance's mission on Mars is astrobiology , including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust).
Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis.
The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet.
JPL, which is managed for NASA by Caltech in Pasadena, California, built and manages operations of the Perseverance rover.
For more about Perseverance:
https://mars.nasa.gov/mars2020
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars 2020 | |
| Instrument Host | Perseverance | |
| Host Type | Rover | |
| Instrument | Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals (SHERLOC) | Wide Angle Topographic Sensor for Operations and Engineering (WATSON) |
| Detector | ||
| Extra Keywords | Color, Dust, Map, Moon | |
| Acquisition Date | ||
| Release Date | 2021-12-28 | |
| Date in Caption | ||
| Image Credit | NASA/JPL-Caltech/ASU/MSSS | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA25065 | |
| Identifier | PIA25065 | |