skip to navigation
|
Belly Dancing on Mars
- Click the image above for a larger view
- Full-Res JPEG (1108 x 790) (109.7 kB)
- Full-Res TIFF (1108 x 790) (997.8 kB)
{kind=link}
Caption:
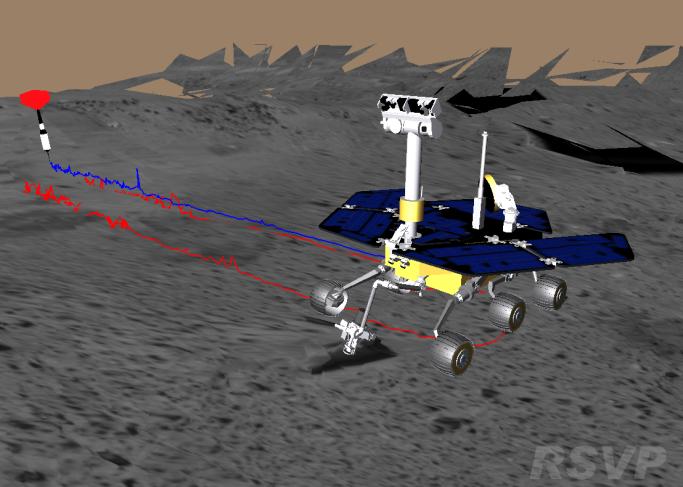
This image shows a screenshot from the software used by engineers to drive the Mars Exploration Rover Spirit. The software simulates the rover's movements across the martian terrain, helping to plot a safe course for the rover. The virtual 3-D world around the rover is built from images taken by Spirit's stereo navigation cameras. Regions for which the rover has not yet acquired 3-D data are represented in beige. The red dart to the left shows a target destination for the rover. Red lines indicate the path the rover's wheels will follow to reach the target, and the blue line denotes the path of the rover's "belly button," as engineers like to call it.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Spirit (MER-A) | |
| Host Type | Rover | |
| Instrument | Navigation Camera (Navcam) | |
| Detector | ||
| Extra Keywords | Color | |
| Acquisition Date | ||
| Release Date | 2004-01-13 | |
| Date in Caption | ||
| Image Credit | NASA/JPL | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05064 | |
| Identifier | PIA05064 | |