skip to navigation
|
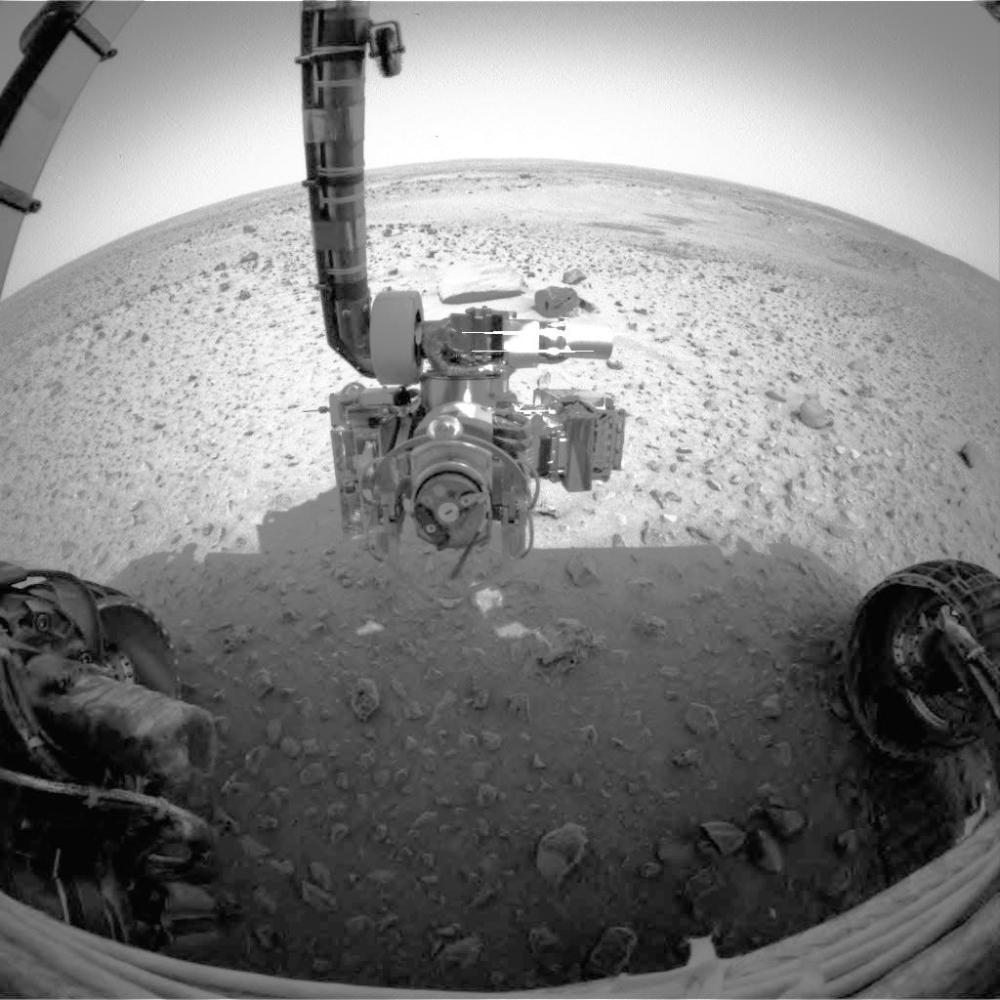
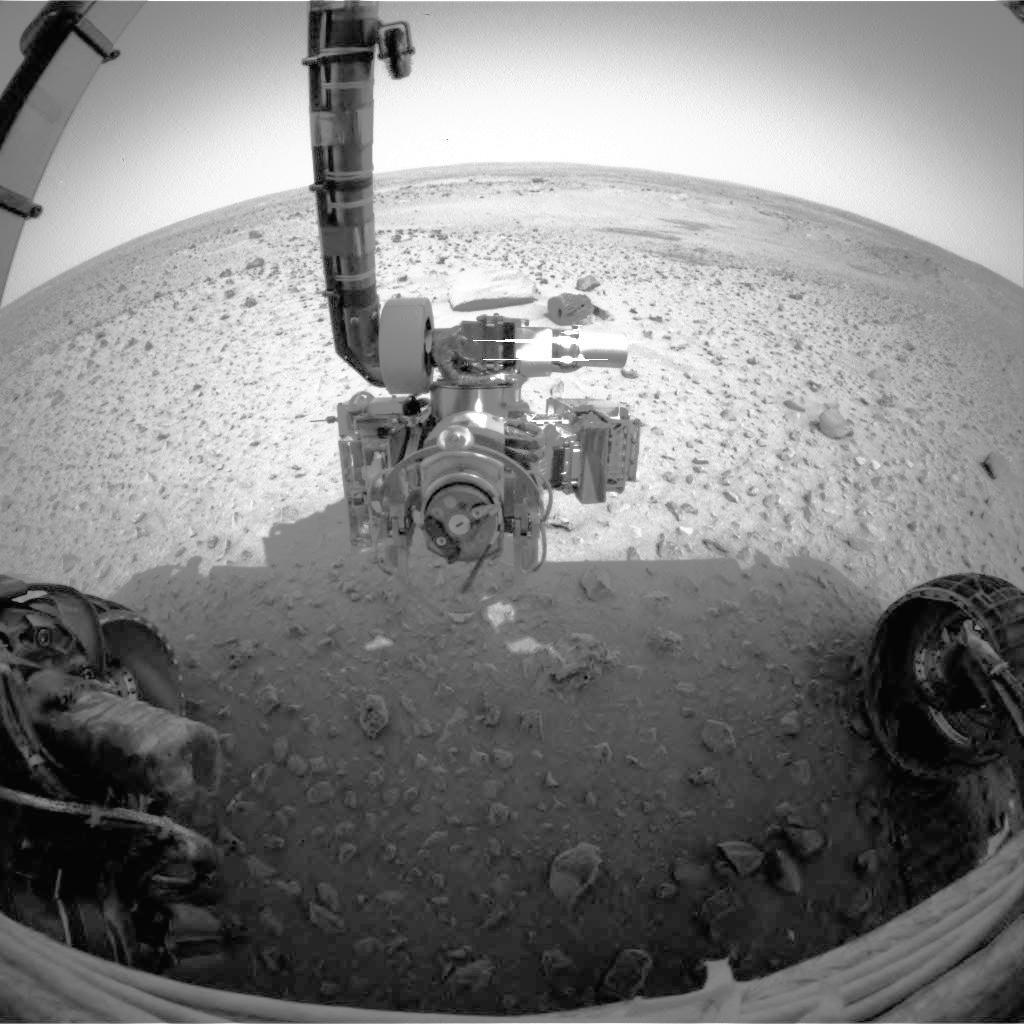
Spirit Reaches for Closer Look
- Click the image above for a larger view
- Full-Res JPEG (1024 x 1024) (116.4 kB)
- Full-Res TIFF (1024 x 1024) (998.4 kB)
{kind=link}
Caption:
This image taken by the front hazard-identification camera on the Mars Exploration Rover Spirit, shows the rover's robotic arm, or instrument deployment device. The arm was deployed from its stowed position beneath the "front porch" of the rover body early Friday morning. This is the first use of the arm to deploy the microscopic imager, one of four geological instruments located on the arm. The instrument will help scientists analyze and understand martian rocks and soils by taking very high resolution, close-up images.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | Mars Exploration Rover (MER) | |
| Instrument Host | Spirit (MER-A) | |
| Host Type | Rover | |
| Instrument | Hazard Camera (Hazcam) | |
| Detector | ||
| Extra Keywords | Grayscale | |
| Acquisition Date | ||
| Release Date | 2004-01-16 | |
| Date in Caption | ||
| Image Credit | NASA/JPL/US Geological Survey | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05096 | |
| Identifier | PIA05096 | |