skip to navigation
|
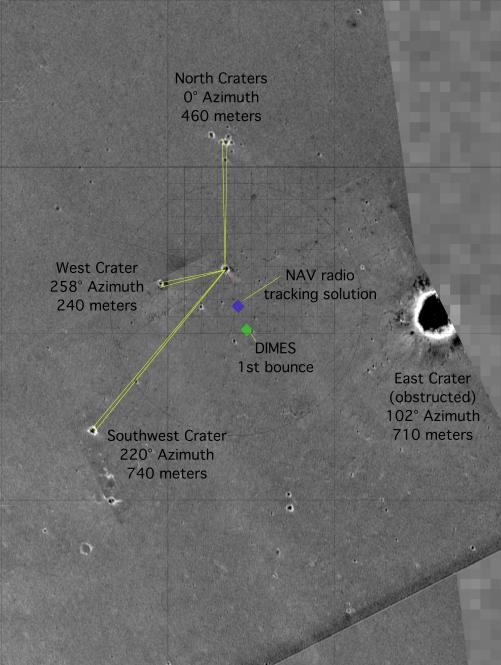
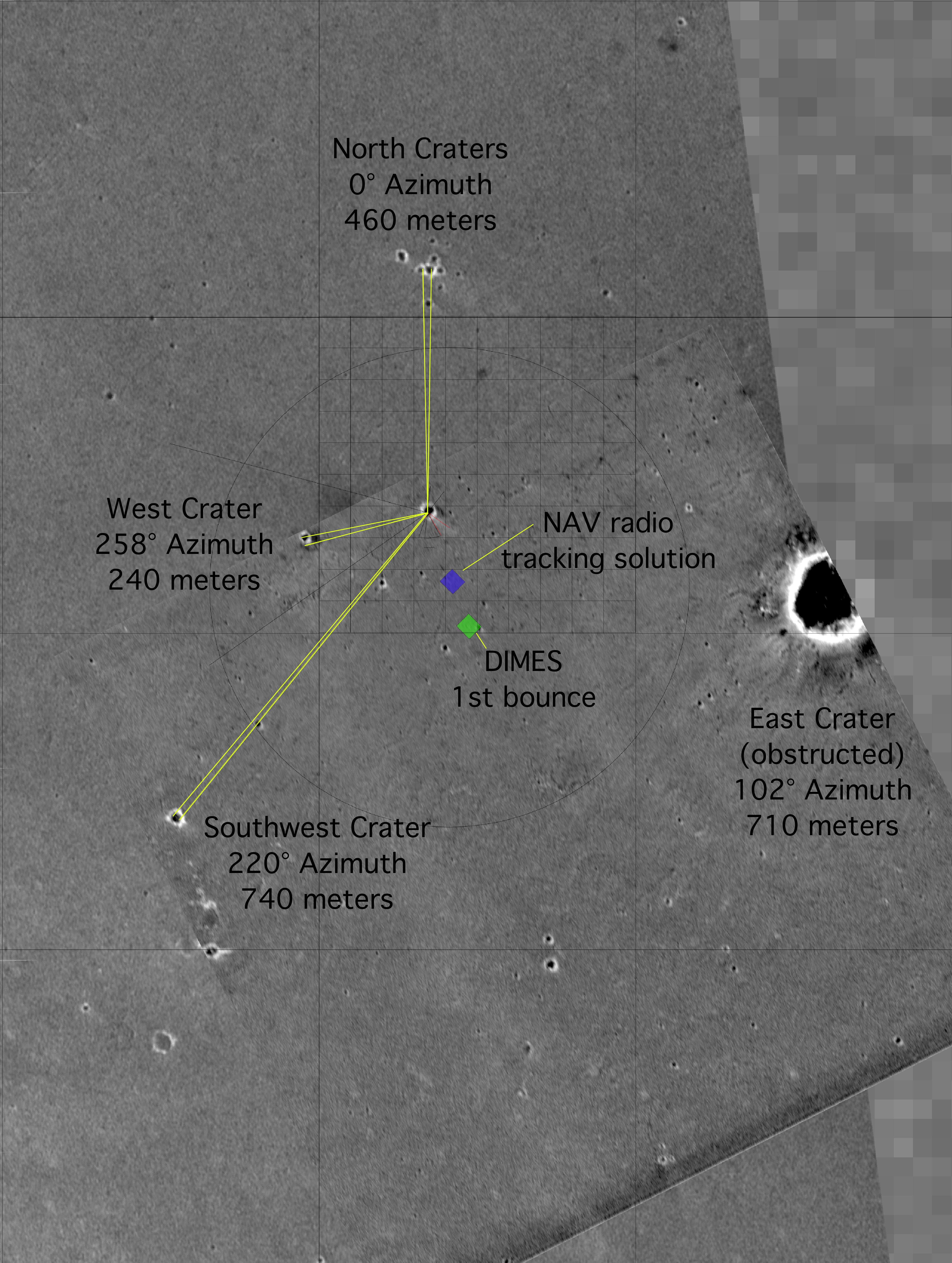
“X” Marks the Spot
- Click the image above for a larger view
- Full-Res JPEG (4000 x 5308) (2.1 MB)
- Full-Res TIFF (4000 x 5308) (11.6 MB)
{kind=link}
Caption:
This map of the Mars Exploration Rover Opportunity's new neighborhood at Meridiani Planum, Mars, shows the surface features used to locate the rover. By imaging these "bumps" on the horizon from the perspective of the rover, mission members were able to pin down the rover's precise location. The image consists of data from the Mars Global Surveyor orbiter, the Mars Odyssey orbiter and the descent image motion estimation system located on the bottom of the rover.
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | Mars | |
| System | ||
| Target Type | Planet | |
| Mission | 2001 Mars Odyssey | Mars Exploration Rover (MER), Mars Global Surveyor (MGS) |
| Instrument Host | Mars Odyssey | Mars Global Surveyor, Opportunity (MER-B) |
| Host Type | Orbiter | Rover |
| Instrument | Descent Image Motion Estimation System (DIMES) | Mars Orbiter Camera (MOC), Thermal Emission Imaging System (THEMIS) |
| Detector | ||
| Extra Keywords | Color, Map | |
| Acquisition Date | ||
| Release Date | 2004-02-09 | |
| Date in Caption | ||
| Image Credit | NASA/JPL/MSSS/ASU | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA05228 | |
| Identifier | PIA05228 | |