|
Brightness and Topography Images of a Dark Hill
- Click the image above for a larger view
- Full-Res JPEG (2700 x 1350) (267.0 kB)
- Full-Res TIFF (2700 x 1350) (10.9 MB)
{kind=link}
Caption:
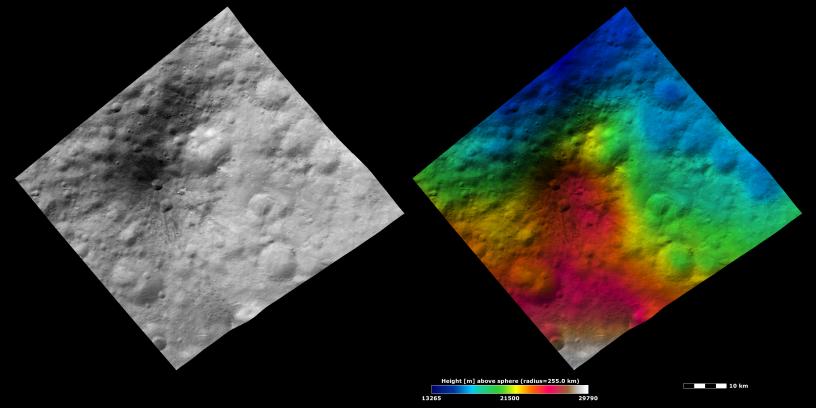
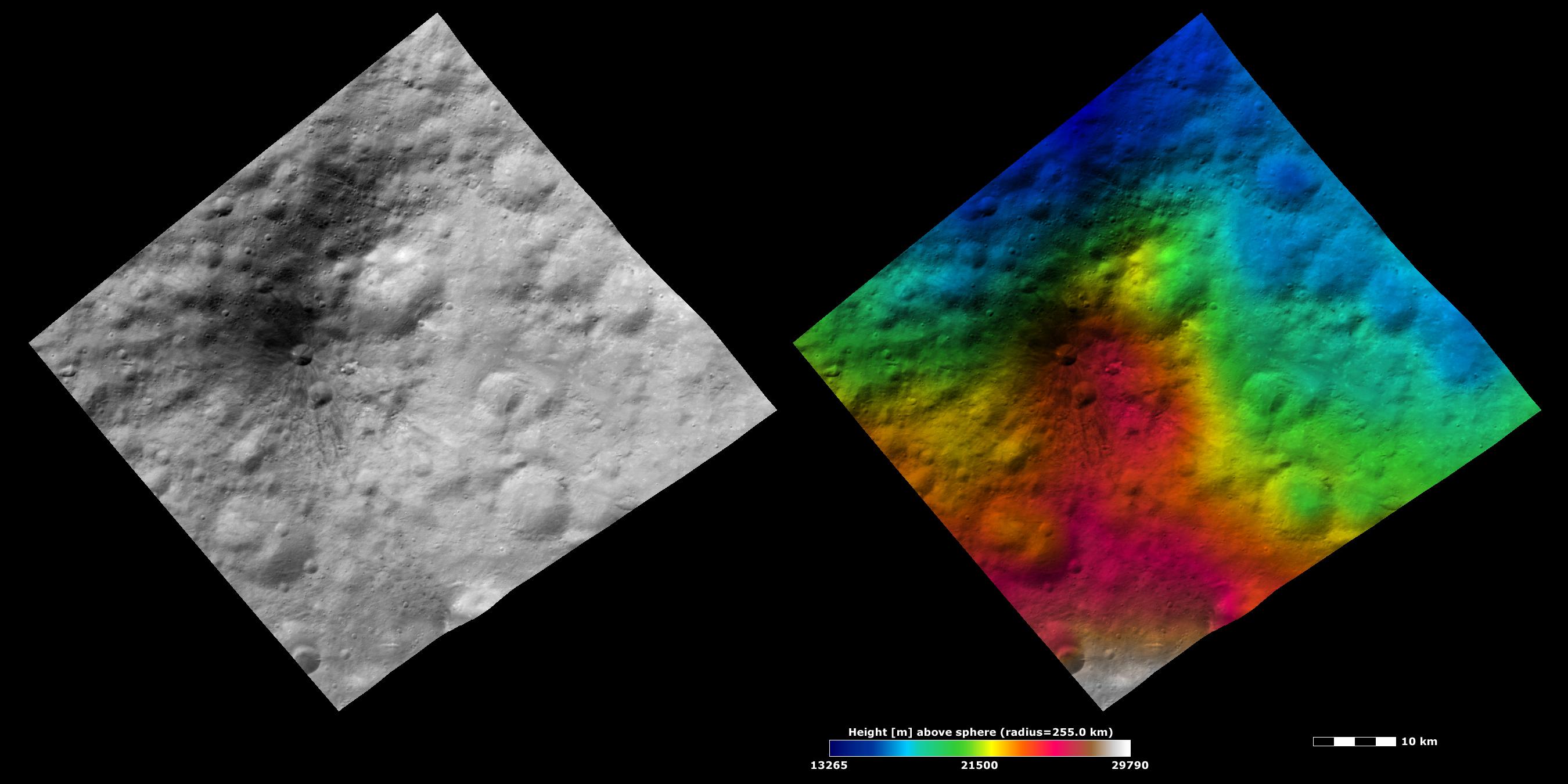
The left-hand image is a Dawn FC (framing camera) brightness image, which shows the brightness/darkness of Vesta's surface. The right-hand image is based on this brightness image, which has had a color-coded height representation of topography overlain onto it. The topography is calculated from a set of images that were observed from different viewing directions, which allows stereo reconstruction. The various colors correspond to the height of the area. The white and red areas in the center and bottom of the topography image are the highest areas and the blue area in the top of the image is the lowest area. The dark hill shows up clearly as a red, high topography feature in the topography image.
These images are located in Vesta's Marcia quadrangle and the center of the images is 10.3 degrees north latitude, 163.2 degrees east longitude. NASA's Dawn spacecraft obtained the brightness image with its framing camera on Oct. 21, 2011. This image was taken through the camera's clear filter. The distance to the surface of Vesta is 700 kilometers (435 miles) and the image has a resolution of about 70 meters (230 feet) per pixel. This image was acquired during the HAMO (high-altitude mapping orbit) phase of the mission. These images are lambert-azimuthal map projected.
Background Info:
The Dawn mission to Vesta and Ceres is managed by NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, for NASA's Science Mission Directorate, Washington D.C. UCLA is responsible for overall Dawn mission science. The Dawn framing cameras have been developed and built under the leadership of the Max Planck Institute for Solar System Research, Katlenburg-Lindau, Germany, with significant contributions by DLR German Aerospace Center, Institute of Planetary Research, Berlin, and in coordination with the Institute of Computer and Communication Network Engineering, Braunschweig. The Framing Camera project is funded by the Max Planck Society, DLR, and NASA/JPL.
More information about the Dawn mission is online at http://www.nasa.gov/dawn and http://dawn.jpl.nasa.gov .
Cataloging Keywords:
| Name | Value | Additional Values |
|---|---|---|
| Target | 4 Vesta | |
| System | Main Belt | |
| Target Type | Asteroid | |
| Mission | Dawn | |
| Instrument Host | Dawn | |
| Host Type | Orbiter | |
| Instrument | Framing Camera (FC) | |
| Detector | ||
| Extra Keywords | Color, Map | |
| Acquisition Date | ||
| Release Date | 2012-02-21 | |
| Date in Caption | 2011-10-21 | |
| Image Credit | NASA/JPL-Caltech/UCLA/MPS/DLR/IDA | |
| Source | photojournal.jpl.nasa.gov/catalog/PIA15385 | |
| Identifier | PIA15385 | |